Das, nach Ernst Abbe benannte, Abbe’sche Komparatorprinzip beschäftigt sich mit den Messabweichungen 1. und 2. Ordnung. In diesem Artikel werden diese anhand von Beispielen zu Messungen mit einem Messschieber oder Seilzugwegsensor erklärt.
Messabweichung 1. Ordnung
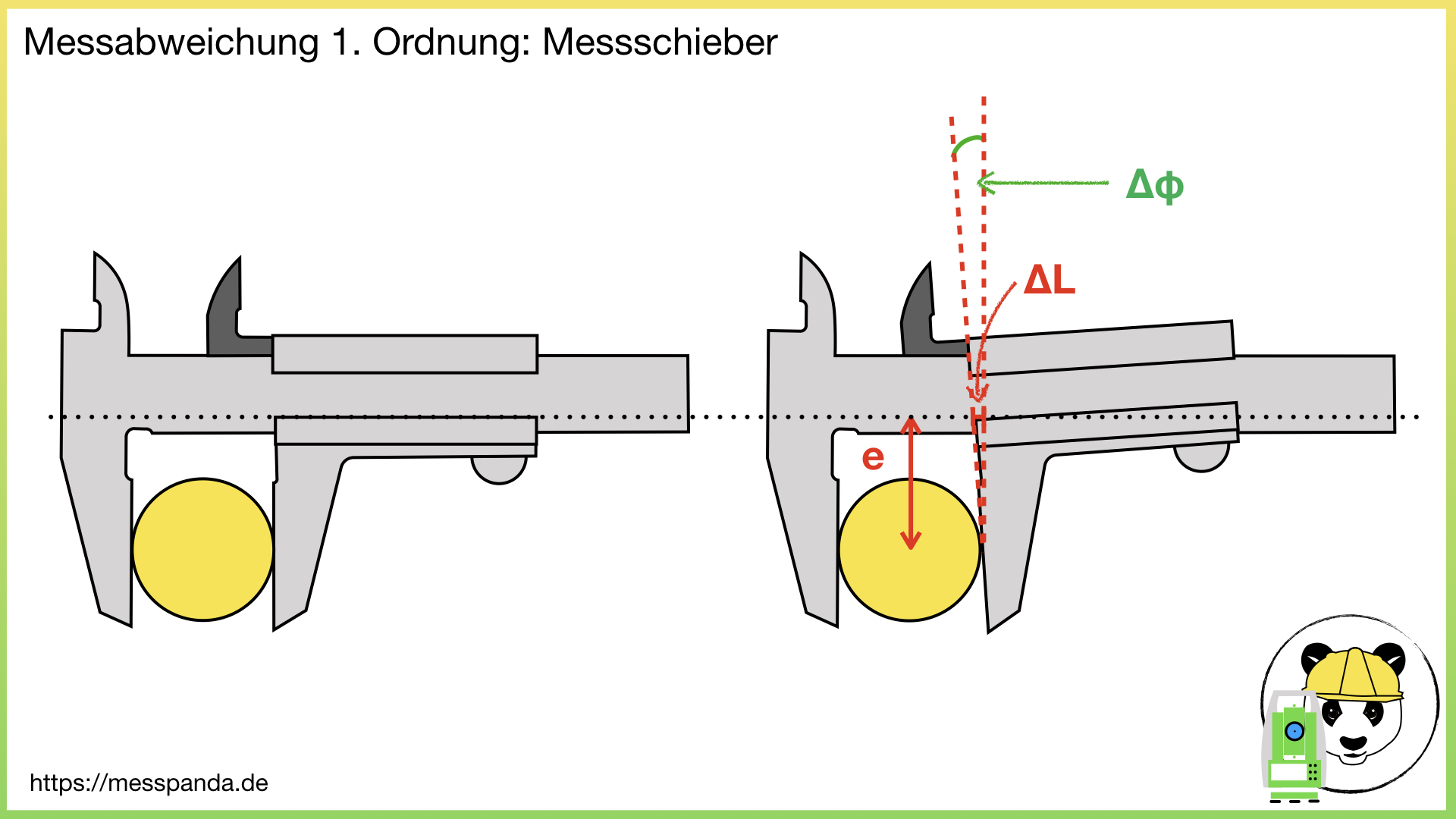
Bei einer Messung kann es zu einer ungewollten Verkippung des Instruments, eines Hilfswerkzeuges oder des zu messenden Objekts kommen. Dabei entsteht der Kippwinkelunterschied ΔΦ. Außerdem ist der Abstand e des Messinstruments zum Messobjekt entscheidend. Je niedriger dieser ist, desto geringer ist die Auswirkung des Abbe’schen Komparatorprinzips.
Beim Messschieber tritt diese Abweichung auf, wenn einer der beiden Messschenkel schief ist. Dies kann bei dem beweglichen Messschenkel leicht passieren, weil er für die Beweglichkeit etwas locker sitzen muss.
Nachvollziehbar ist die Abweichung etwa auch bei einer Messanordnung eines Seilzugwegsensors. Im Bild ist die Streckenlänge zwischen den Mittelpunkten zweier Bohrlöcher gesucht. Dazu wird ein Bolzen jeweils in die Bohrlöcher gesteckt und fluchtend angemessen. Danach wird die Differenz der Strecken gebildet. Wenn der Bolzen in einem Bohrloch schief sitzt, wird eine Messabweichung 1. Ordnung verursacht.
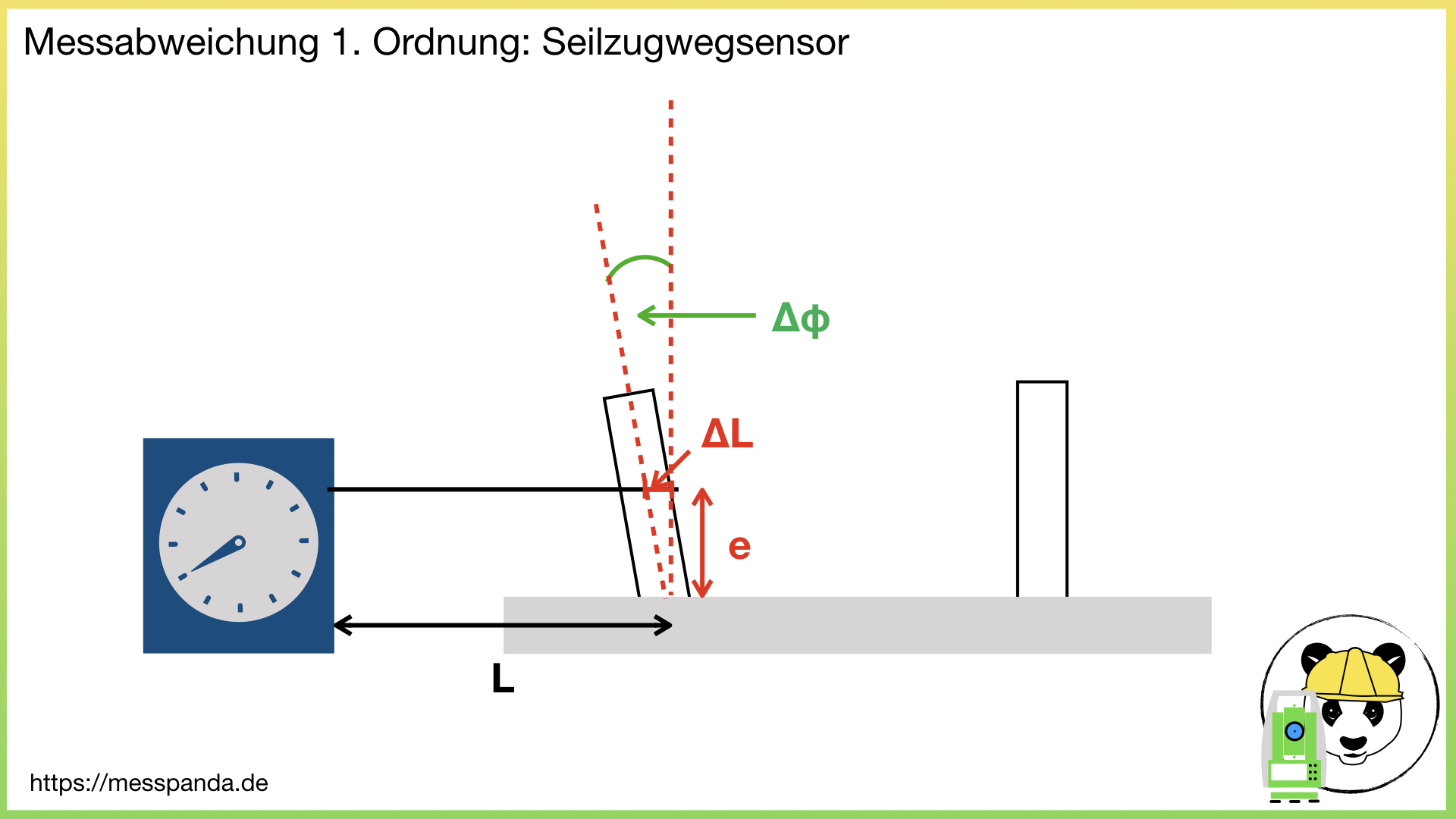
Im Abstand e entsteht bei einem Kippwinkelunterschied ΔΦ in einer der beiden Ablesepositionen eine systematische Messabweichung ΔL. Die Formel von ΔL resultiert aus dem durch e und ΔL aufgespannten rechtwinkligen Dreieck. Sie zeigt, dass die Abweichung sowohl von dem Parallelversatz e als auch von dem Verkippungswinkel ΔΦ abhängt. Die Auswirkung steigt linear mit dem Parallelversatz e und tangential mit dem Verkippungswinkel ΔΦ an. Da ΔΦ klein ist, verhält es sich allerdings näherungsweise linear.

Um die Messabweichung 1. Ordnung zu minimieren, müssen folglich e und/oder ΔΦ reduziert werden. Die Abweichung kann beim Messschieber minimiert werden, indem das Prüfstück möglichst nah an den Messschieber herangeschoben wird. Dabei wird e kleiner.
Bei dem Beispiel des Seilzugwegsensors würde es helfen, die Öse des Sensors weiter unten zu befestigen. In diesem Fall müsste aber auch der Sensor nach unten verschoben werden, um die Parallelität des Seils zum Messobjekt weiterhin zu gewährleisten. Die Schiefstellung ΔΦ kann reduziert werden, indem bei dem Seilzugwegsensor ein Stab benutzt wird, der besonders stabil und dicht im Prüfling sitzt.
Messabweichung 2. Ordnung
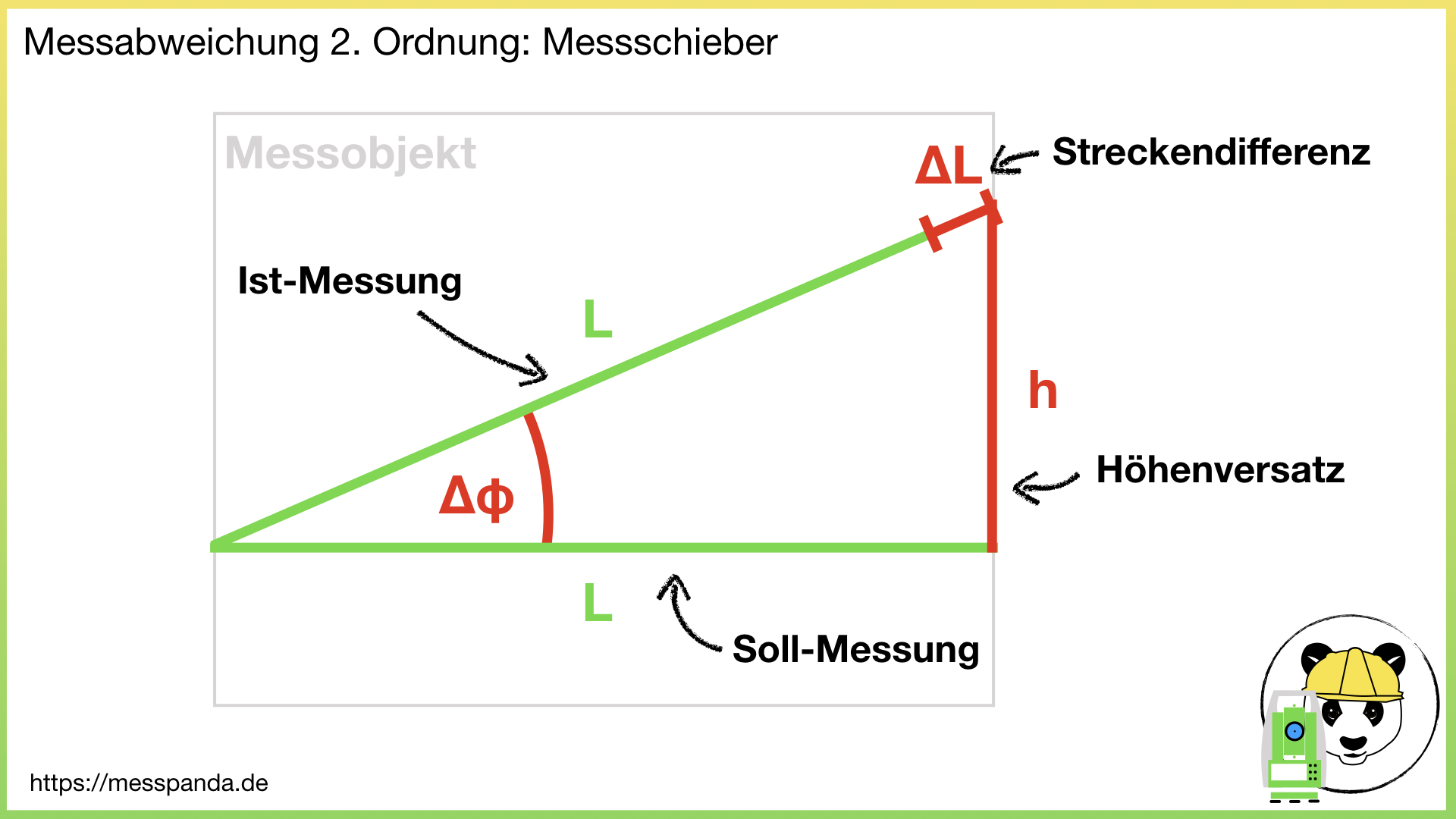
Die Messabweichung 2. Ordnung entsteht, wenn das Instrument und das Messobjekt in einer Flucht angeordnet sein müssen, dies aber nicht zutrifft. Sie kann beim Messschieber zum Beispiel auftreten, wenn die Breite eines Objekts gemessen werden soll. Im Bild wird das Objekt schief angemessen. Dadurch wird die Strecke L um ΔL zu lang gemessen. Deshalb ist es ratsam an einem Messschieber etwas zu ruckeln und ihn dabei zusammenzudrücken, um die direkteste und damit kürzeste Messung zu ermöglichen.
Beim Seilzugwegsensor kann eine Messabweichung 2. Ordnung leicht eintreten, weil das Seil verschwenkt werden kann. Die folgende Abbildung zeigt ein Beispiel, in dem die Höhe eines Objekts bestimmt werden soll.
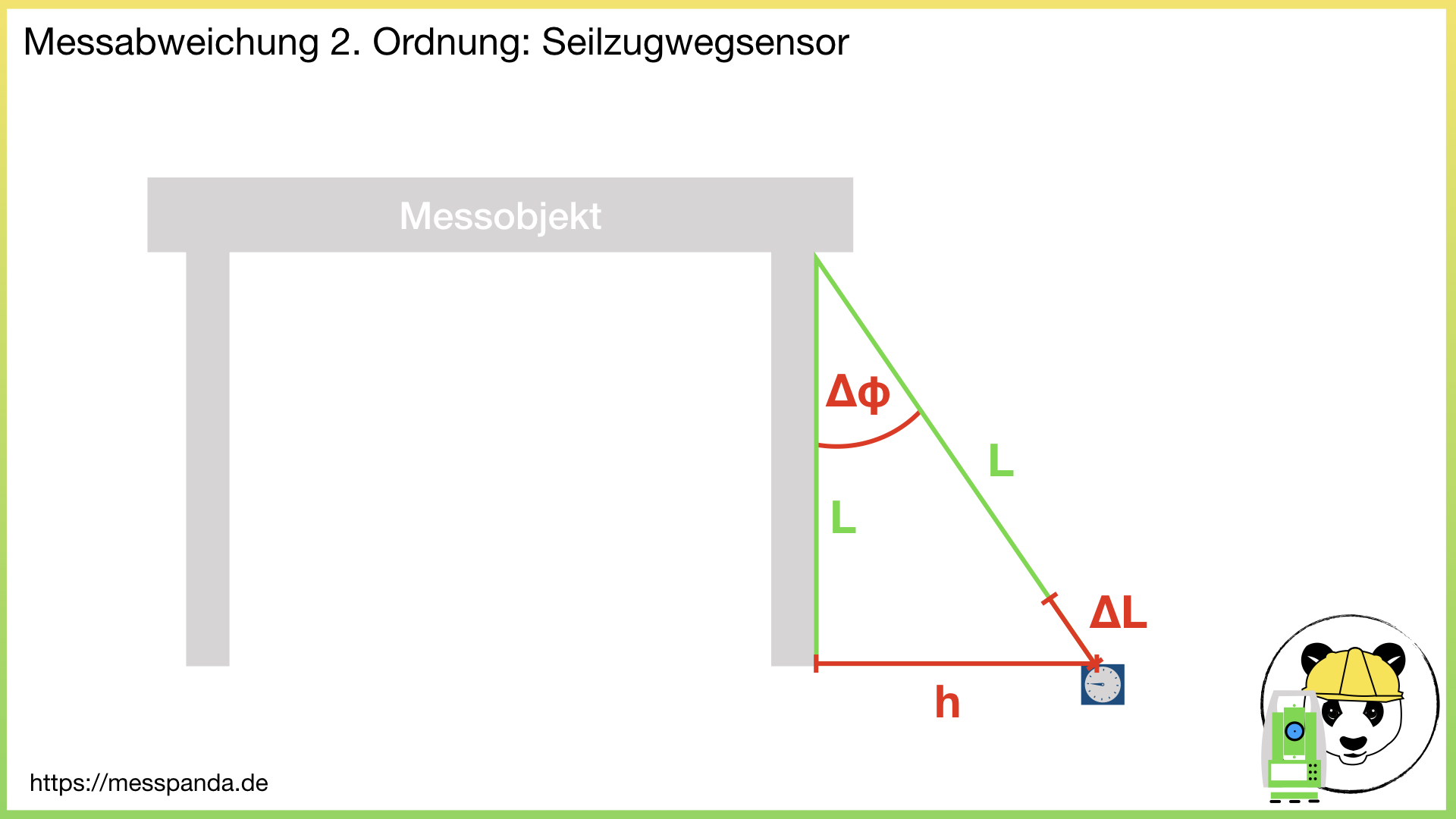
Eine fluchtende/parallele Ausrichtung des Seilzugwegsensors kann, in diesem Beispiel, erzielt werden, indem bei der Ausrichtung der Ausschlag des Sensors beobachtet wird. Bei einer fluchtenden Ausrichtung muss die Strecke L kurz sein. Jede Abweichung von der Flucht verlängert die Strecke. Beim Aufbau kann daher die Ausrichtung verändert werden bis die Anzeige die kürzeste Strecke zurückgibt.
Die Formel dazu lässt sich mit dem Pythagoras und der ersten binomischen Formel herleiten. Gemäß Pythagoras gilt:

Auf der rechten Seite wird die binomische Formel aufgelöst.

Auf beiden Seiten wird -L2 gerechnet. ΔL ist sehr klein. Wenn eine Zahl <0 quadriert wird, wird sie noch kleiner. Daher ist ΔL2 vernachlässigbar. Also ergibt sich:

h kann auch wie folgt ausgedrückt werden:

ΔΦ ist sehr klein. Daher gilt näherungsweise tan(ΔΦ) ≈ ΔΦ. Eingesetzt ergibt das:

Vergleich
Die Messabweichung 1. Ordnung ist die kritischere der beiden. Sie wirkt sich linear aus. Die Messabweichung 2. Ordnung hat einen kleineren Einfluss, weil sie sich quadratisch auswirkt. Da h und ∆Φ jeweils klein sind, sind ihre quadrierten Werte noch kleiner.